Loop Gain for Stability Margins Avoid This Mistake - Classical Feedback Control - Section 2 Module 6
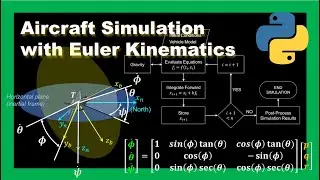
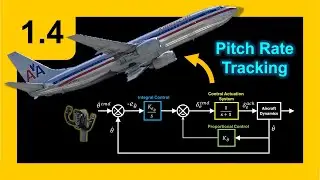
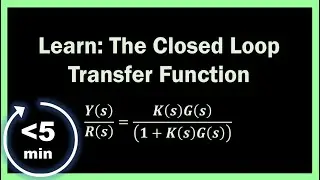
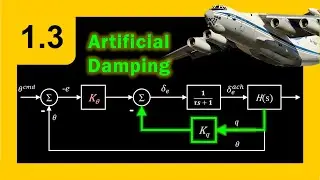
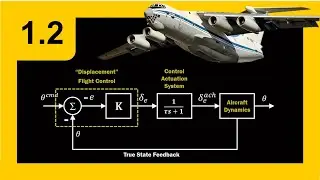
When the need to determine loop gain arises, having a sign error in the controller is a common mistake. This video identifies the source of this mistake and provides simple instruction for correction. First, we motivate the problem with a suspicious Nyquist plot. We then use Kalman's Identity to define loop gain through the return difference transfer function. A simple architecture for a tracking controller and a regulator is provided and loop gain is identified. Finally we return to the suspicious Nyquist plot and a loop gain correction involving a simple sign change to the dynamic controller or compensator output equation is explained.
Watch video Loop Gain for Stability Margins Avoid This Mistake - Classical Feedback Control - Section 2 Module 6 online, duration hours minute second in high quality that is uploaded to the channel Ben Dickinson 18 November 2020. Share the link to the video on social media so that your subscribers and friends will also watch this video. This video clip has been viewed 2,874 times and liked it 25 visitors.
![HEMSO // ICH BIN VERRÜCKT // [ official Video ]](https://images.reviewsvideo.ru/videos/_H111PLyYEA)