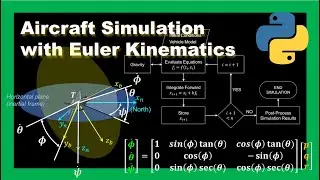
Artificial Damping - Flight Control Fundamentals - Section 1.3
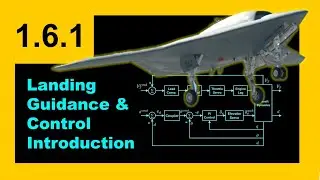
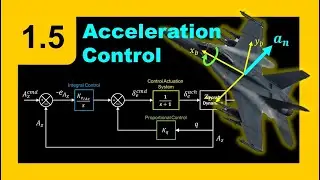
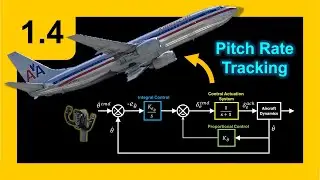
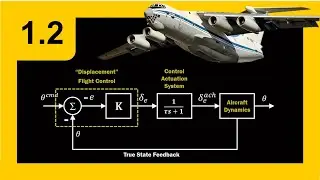
In Section 1.2 we observed that while the pitch tracking "displacement" controller was effective at rejecting an external disturbance, it simultaneously and unavoidably excited of the short period mode producing an undesirable transient response . In this section, a feedback control loop that provides artificial damping is introduced to the proportional pitch angle tracking controller. We show artificial damping is effective at correcting the undesirable transient response of the short period. Nyquist plots show that artificial damping adds robustness. A comparison between linear and nonlinear simulations is made. Portions of the script that perform the analysis in this video are reviewed. Artificial damping is a fundamental technique in flight control to address an underdamped aircraft response.
Notes:
You'll notice a discrepancy between the sign of K_theta in this video and the previous. Since publishing Section 1.2, it was discovered that K_theta should be shown as negative with the form of the displacement controller shown. The positive gain value with the controller sign error cancelled each other so that the error had no effect on results in Section 1.2. It was corrected here.
Background Music:
Attribution: "Oceantapping" by P C III
Souce: https://commons.wikimedia.org/wiki/Fi...
References:
1. Blakelock, J.H. “Automatic Control of Aircraft and Missiles,” John Wiley & Sons, Inc., 1965.
2. Stevens, B.L., “Aircraft Control and Simulation,” John Wiley & Sons, Inc., 2003.
Errata:
1. Elevator direction is flipped in animations.
Watch video Artificial Damping - Flight Control Fundamentals - Section 1.3 online, duration hours minute second in high quality that is uploaded to the channel Ben Dickinson 07 August 2022. Share the link to the video on social media so that your subscribers and friends will also watch this video. This video clip has been viewed 3,765 times and liked it 81 visitors.