Pitch Tracking Control with Lead Compensation – Flight Control Fundamentals – Section 1.6.2
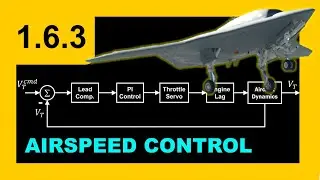
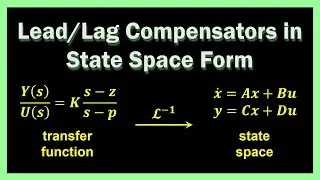
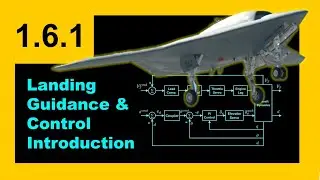
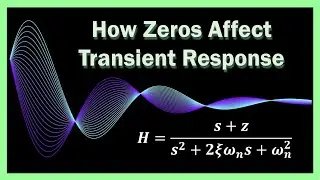
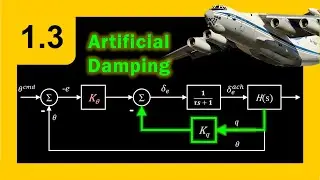
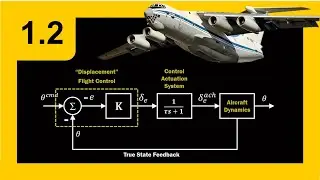
In this lesson a lead compensator is applied to improve the pitch angle tracking response of a transport aircraft. The nonlinear longitudinal aircraft equations of motion are linearized about the glide slope, providing an LTI system for control. The open loop dynamics shows a zero near the origin, which attracts the closed loop pitch pole related to tracking rise time. Thus, the zero limits closed loop performance. To circumvent this issue, a lead compensator is introduced in the pitch angle command input channel to cancel the slow and dominant closed loop pole. The result in an improved transient response. However, if the actual pole location is not known accurately, it is shown the lead compensator can result in unacceptably large overshoot. The lead compensated controller developed in this lesson will be used in the upcoming lessons on automatic aircraft landing systems.
Website: https://www.learngandc.com
Support and Get Codes: https://www.patreon.com/user?u=86359827
Watch video Pitch Tracking Control with Lead Compensation – Flight Control Fundamentals – Section 1.6.2 online, duration hours minute second in high quality that is uploaded to the channel Ben Dickinson 17 June 2023. Share the link to the video on social media so that your subscribers and friends will also watch this video. This video clip has been viewed 1,442 times and liked it 51 visitors.