Supervisory Control Theory-Based Framework for Multiple Robots Autonomous Navigation
Title: Supervisory Control Theory-Based Framework for Multiple Robots Autonomous Navigation Carrying Out Distinct Tasks
Paper submitted to the European Journal of Control (EJC).
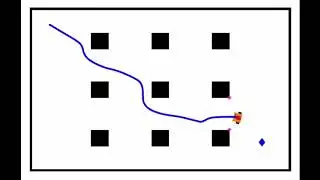
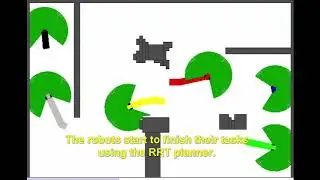
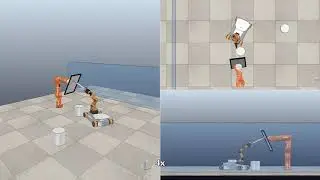
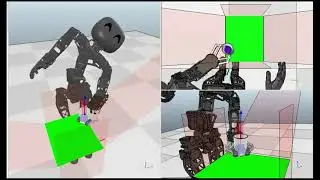
Abstract: This paper proposes two approaches based on the Supervisory Control Theory (SCT) to attain a hybrid planner for autonomous navigation of multiple robots with tasks being assigned by a centralized scheduler. Essentially, both strategies differ regarding the representation of the scheduler as a Discrete Event System (DES). Nevertheless, both approaches share the central idea of considering the robots as DES allowing the use of SCT to model and control the behavior of each robot of the system. Particularly, SCT is used to gather deliberative and reactive motion planning algorithms through a structured procedure aiming to obtain a hybrid planner able to perform safe navigation in a mapped workspace with unknown obstacles. The open-loop behavior and the reduced supervisors are provided for each approach and, when the scheduler is not handled as a DES, a pseudo-code describing its interaction with the robots is presented. Furthermore, as a case study, simulations and experiments considering mobile robots are carried out to corroborate the proposed framework.
Simulations and experiments repository: https://lacsed.eng.ufmg.br/ejc-reposi...
Watch video Supervisory Control Theory-Based Framework for Multiple Robots Autonomous Navigation online, duration hours minute second in high quality that is uploaded to the channel macro@ufmg 29 December 2019. Share the link to the video on social media so that your subscribers and friends will also watch this video. This video clip has been viewed 198 times and liked it 1 visitors.