Whole-Body Control with (Self) Collision Avoidance using Vector Field Inequalities (second version)
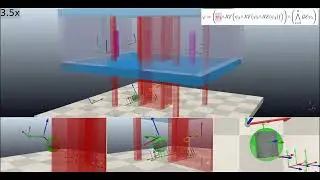
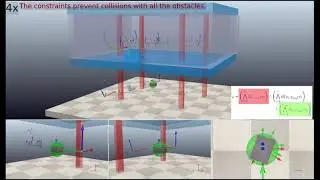
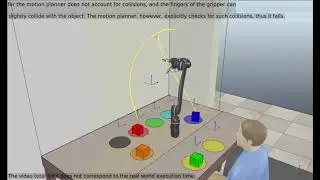
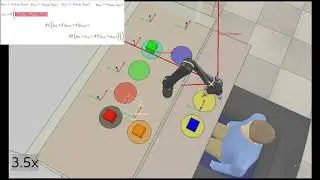
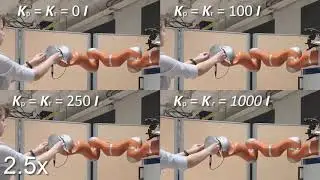
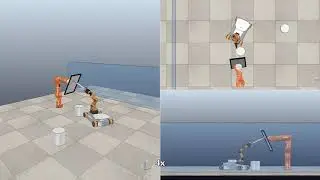
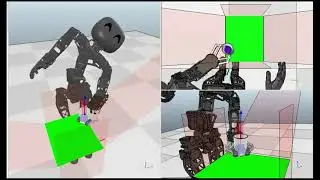
This work uses vector field inequalities (VFI) to prevent robot self-collisions and collisions with the workspace. Differently from previous approaches, the method is suitable for both velocity and torque-actuated robots. We propose a new distance function and its corresponding Jacobian in order to generate a VFI to limit the angle between two Plücker lines. This new VFI is used to prevent both undesired end-effector orientations and violation of joints limits. The proposed method is evaluated in a realistic simulation and on a real humanoid robot, showing that all constraints are respected while the robot performs a manipulation task.
Watch video Whole-Body Control with (Self) Collision Avoidance using Vector Field Inequalities (second version) online, duration hours minute second in high quality that is uploaded to the channel macro@ufmg 19 June 2019. Share the link to the video on social media so that your subscribers and friends will also watch this video. This video clip has been viewed 131 times and liked it 3 visitors.