Coupled Task-Space Admittance Controller Using Dual Quaternion Logarithmic Mapping
This video accompanies the homonymous paper, whose abstract is:
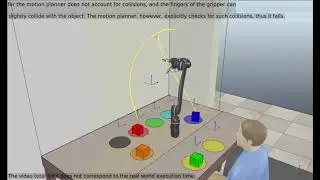
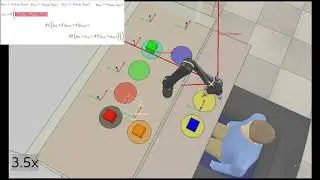
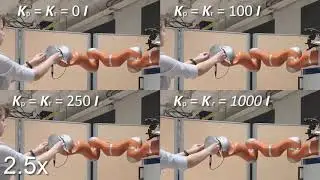
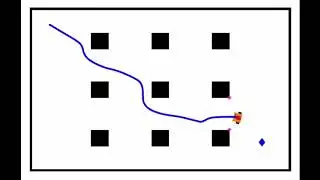
"This paper proposes a six-DOF task-space admittance controller using the dual quaternion logarithmic mapping, coupling the translation and rotation impedance in a single mathematical structure. The controller is designed based on the energy of the system and the stiffness matrix is build to be consistent with the task geometry. Moreover, the formulation is free of topological obstruction and we present a solution for the unwinding phenomenon based on a switched error function. The closed-loop system is composed of an inner motion control loop to ensure the trajectory tracking of the end-effector pose while an outer loop imposes a desired apparent impedance to the robot. Experiments executed on a KUKA LWR4+ robot with a force/torque sensor in the end-effector, together with statistical analyses, show better performance of the proposed controller over one of the main six-DOF controllers from the state of the art. More specifically, our controller presents an exponential decay in all situations, a task-error closed-loop behavior closer to the desired one, and it is free from topological obstruction and unwinding, while presenting a statistically equivalent control effort."
Watch video Coupled Task-Space Admittance Controller Using Dual Quaternion Logarithmic Mapping online, duration hours minute second in high quality that is uploaded to the channel macro@ufmg 15 May 2020. Share the link to the video on social media so that your subscribers and friends will also watch this video. This video clip has been viewed 494 times and liked it 10 visitors.