Economic MPC for Obstacle Avoidance in Robotics Applications
Abstract:
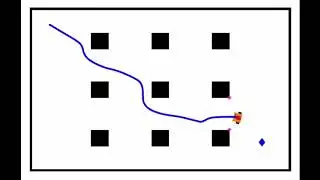
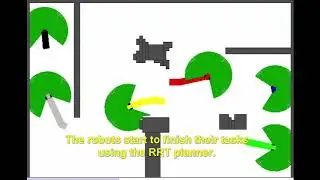
This work considers an Economic Model Predictive Control (EMPC) framework to solve the navigation problem of mobile robots while providing obstacle avoidance feature. With that purpose, an artificial potential field composed of attraction and repulsive potential functions is employed in order to define an economic oriented stage cost. These economic criteria are gathered with the Model Predictive Control (MPC) standard quadratic cost aiming to generate an artificial collision-free trajectory. Moreover, constraints are imposed on the optimization problem in order to ensure the feasibility of the economic trajectory and to avoid input saturation. Finally, simulation results considering differential mobile robots with non-holonomic constraints are carried out to corroborate the proposed control strategies.
Authors:
Marcelo A. Santos, Antonio Ferramosca and Guilherme V. Raffo
Watch video Economic MPC for Obstacle Avoidance in Robotics Applications online, duration hours minute second in high quality that is uploaded to the channel macro@ufmg 17 March 2020. Share the link to the video on social media so that your subscribers and friends will also watch this video. This video clip has been viewed 266 times and liked it 6 visitors.