DQ Robotics 19.10
DQ Robotics is a standalone open-source (LGPLv3) library for robot modeling and controlling dual quaternion algebra that is computationally efficient, easy to use and is intuitive enough to be used for self-study and education and sufficiently efficient for deployment on real applications.
It is written in three languages, namely Python, MATLAB, and C++, all of them sharing a unified programming style to make the transition from one language to another as smooth as possible, enabling fast prototype-to-release cycles. Furthermore, a great effort has been made to make coding as close as possible to the mathematical notation used on paper, making it easy to implement code as soon as one has grasped the mathematical concepts.
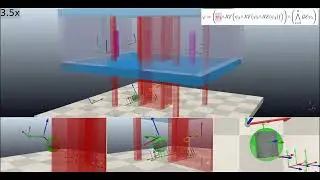
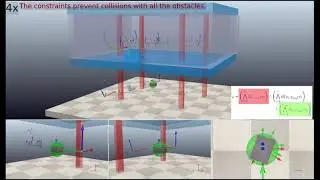
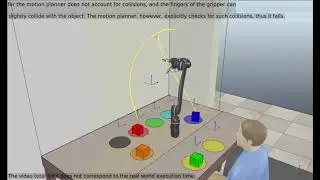
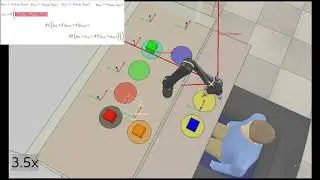
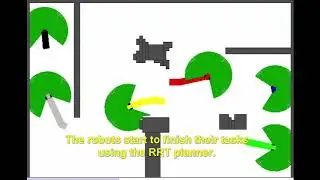
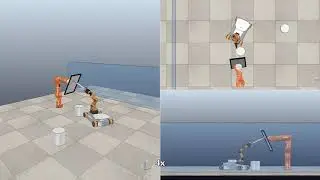
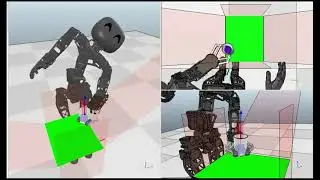
This video shows a complete robot control example of two robots cooperating in a task where one manipulator robot and a mobile manipulator interact while deviating from obstacles in the workspace.
It highlights some interesting features of DQ Robotics: real-time constrained optimization-based controllers, automatic whole-body model generation, and simple interface with V-REP. However, there is much more on DQ Robotics. Please check it out: http://dqrobotics.github.io.
Watch video DQ Robotics 19.10 online, duration hours minute second in high quality that is uploaded to the channel macro@ufmg 25 October 2019. Share the link to the video on social media so that your subscribers and friends will also watch this video. This video clip has been viewed 524 times and liked it 12 visitors.