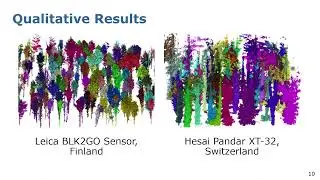
Talk by I. Vizzo: Poisson Surface Reconstruction for LiDAR Odometry and Mapping (ICRA'21)
I. Vizzo, X. Chen, N. Chebrolu, J. Behley, and C. Stachniss, “Poisson Surface Reconstruction for LiDAR Odometry and Mapping,” in Proceedings of the IEEE Int. Conf. on Robotics & Automation (ICRA), 2021.
Paper: https://www.ipb.uni-bonn.de/wp-conten...
Code: https://github.com/PRBonn/puma
#UniBonn #StachnissLab #robotics #autonomouscars #slam #talk
Смотрите видео Talk by I. Vizzo: Poisson Surface Reconstruction for LiDAR Odometry and Mapping (ICRA'21) онлайн, длительностью часов минут секунд в хорошем качестве, которое загружено на канал Cyrill Stachniss 08 Июнь 2021. Делитесь ссылкой на видео в социальных сетях, чтобы ваши подписчики и друзья так же посмотрели это видео. Данный видеоклип посмотрели 4,007 раз и оно понравилось 72 посетителям.