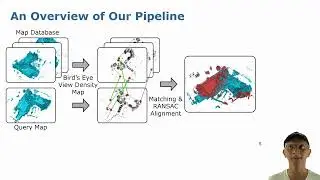
Talk by S. Gupta: Effectively Detecting Loop Closures using Point Cloud Density Maps (ICRA'2024)
Talk at ICRA'2024 about the paper:
S. Gupta, T. Guadagnino, B. Mersch, I. Vizzo, and C. Stachniss, “Effectively Detecting Loop Closures using Point Cloud Density Maps,” in Proc. of the IEEE Intl. Conf. on Robotics & Automation (ICRA), 2024.
PDF: https://www.ipb.uni-bonn.de/wp-conten...
CODE: https://github.com/PRBonn/MapClosures
Watch video Talk by S. Gupta: Effectively Detecting Loop Closures using Point Cloud Density Maps (ICRA'2024) online, duration hours minute second in high quality that is uploaded to the channel Cyrill Stachniss 21 April 2024. Share the link to the video on social media so that your subscribers and friends will also watch this video. This video clip has been viewed 605 times and liked it 16 visitors.