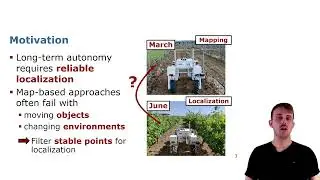
Trailer: Generalizable Stable Points Segmentation for 3D LiDAR Long-Term Localization (RAL'24)
Short Trailer Video for the RAL Paper to be presented at ICRA'2024:
I. Hroob, B. Mersch, C. Stachniss, and M. Hanheide, “Generalizable Stable Points Segmentation for 3D LiDAR Scan-to-Map Long-Term Localization,” IEEE Robotics and Automation Letters (RA-L), vol. 9, iss. 4, pp. 3546-3553, 2024. doi:10.1109/LRA.2024.3368236
PDF: https://www.ipb.uni-bonn.de/wp-conten...
Watch video Trailer: Generalizable Stable Points Segmentation for 3D LiDAR Long-Term Localization (RAL'24) online, duration hours minute second in high quality that is uploaded to the channel Cyrill Stachniss 20 March 2024. Share the link to the video on social media so that your subscribers and friends will also watch this video. This video clip has been viewed 671 times and liked it 27 visitors.