Integrated vector field and backstepping control for quadcopters
Paper published in the IEEE International Conference on Robotics and Automation (ICRA 2023)
Authors: Nunes, A. H. D. ; Raffo, G. V. ; Pimenta, L. C. A.
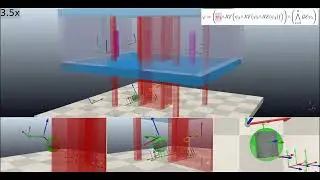
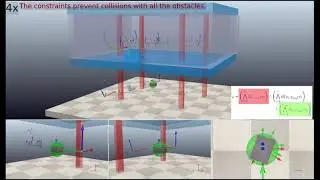
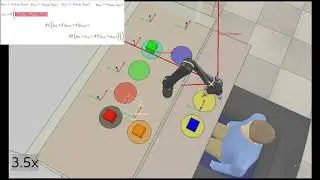
Abstract: In this work, we present an Integrated Guidance and Controller (IGC) scheme to drive quadcopters in path-following tasks with obstacle avoidance and constant uncertainty rejection. This scheme is based on the combination of a time-varying artificial vector field and Backstepping with
integral action control. The vector field switches between two behaviors: (i) path-following; and (ii) obstacle circumnavigation to allow collision avoidance. This vector field is then integrated into a non-linear controller designed via Backstepping with Integral Action to deal with the quadcopter vehicle dynamics and reject constant uncertainties. The considered vehicle
model is based on quaternion algebra. The control inputs are considered to be the total thrust and torques. Stability is proved by using Lyapunov’s Theory and Matrosov’s Theorem.
Смотрите видео Integrated vector field and backstepping control for quadcopters онлайн, длительностью часов минут секунд в хорошем качестве, которое загружено на канал macro@ufmg 26 Июнь 2023. Делитесь ссылкой на видео в социальных сетях, чтобы ваши подписчики и друзья так же посмотрели это видео. Данный видеоклип посмотрели 114 раз и оно понравилось 6 посетителям.